LIE ANALYSIS SYMBOL
OrientationScoreGaugeFrames
OrientationScoreGaugeFrames[objTensor, options]
returns data-adaptive frame from a objTensor that is formatted as a hessian
OrientationScoreGaugeFrames[ObjPositionOrientationData, {σspatial, σangular}, options]
Computes the gauge-frame from ObjPositionOrientationData by first computing the hessian using the σspatial and σangular
Examplesopen all
Basic Examples (2)
The Gauge frame from a Orientation Score can be computed from an OrientationScoreTransform
| In[1]:= |

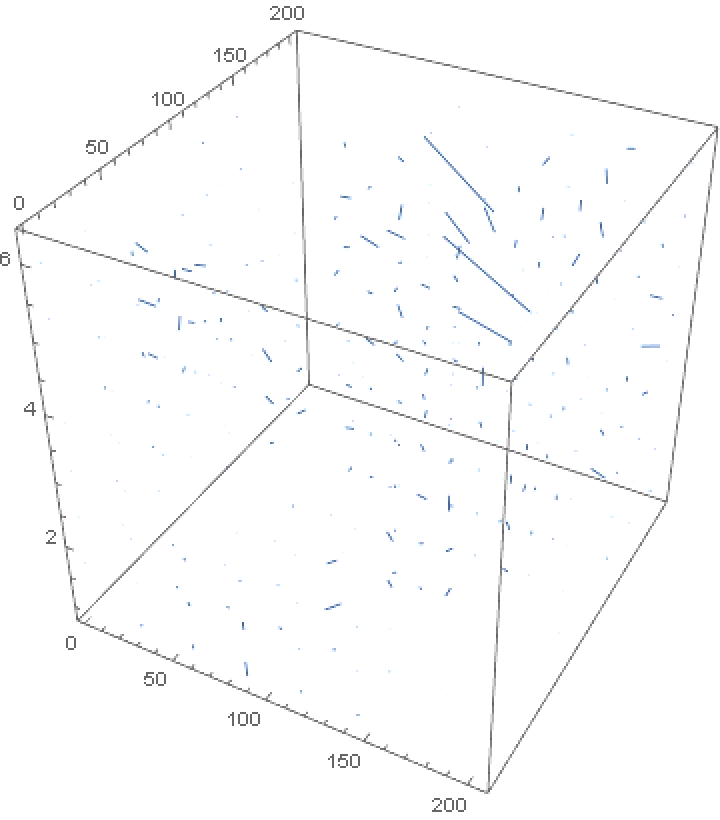
A vector plot can show the vector that points in the direction of the data. The vectors are multiplied by the orientation score to only show the important vectors

An indirect way of computing the Gauge frame is by first computing the Hessian