Enhancing Diffusion's on 3D Images
Note this notebook is a work in progress, and does not make optimal use of the LieAnalysis package.
| LeftInvariantDerivatives3D[Obj3DPositionOrientationData, derivativeIndex] | computes the AderivativeIndex derivatives from Obj3DPositionOrientationData using a finite differences method |
| LeftInvariantDerivatives3D[Obj3DPositionOrientationData, {σs,σo}, derivativesIndex] | using Gaussian derivatives specified by the scales σs and σo |
| OrientationScoreTensor3D[Obj3DPositionOrientationData, {derivativeIndex..}] | construct tensor {AderivativeIndex..} from Obj3DPositionOrientationData using finite differences method |
| OrientationScoreTensor3D[Obj3DPositionOrientationData, {σs,σo}, {derivativeIndex..}] | using Gaussian derivatives specified by the scales σs and σo |
| OrientationScoreGaugeFrames3D[Obj3DPositionOrientationData,{σs,σo}] | computes a data adaptive frame from Obj3DPositionOrientationData |
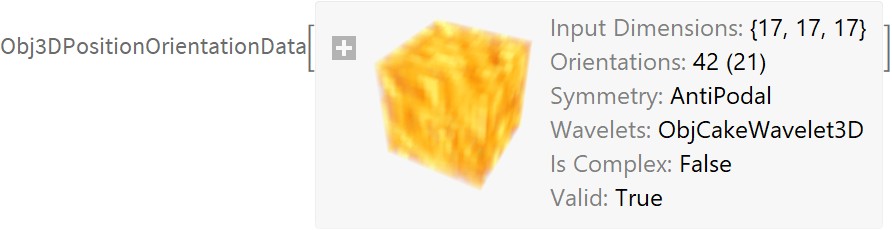
| OrientationScoreTransform3D[data] | computes an orientation score (Obj3DPositionOrientationData) from data |
Functions that can be used for enhancing diffusion's on 3-dimensional images.
Helper Functions
You should run this section, but you might not want to read this section.
Functions to compute structureness
A lot of the functions bellow are included in the LieAnalysis package internally, and should be removed in future releases of this Tutorial.
RotateZY[n_] := RotateZY@@Transpose[n,Join[Range[2, ArrayDepth[n]], {1}]];
RotateZY[x_,y_,z_] := RotateZYC[x,y,z];
RotateZYC = Compile[{{x,_Real},{y,_Real},{z,_Real}},Module[{β,γ,ϵ=10^-8},
If[z<1-ϵ,
If[z>-1+ϵ,
{β,γ}={ArcCos[z],ArcTan[x,y]};,
{β,γ}={π,0};
];,
{β,γ}={0,0};
];
{
{Cos[β] Cos[γ],-Sin[γ],Cos[γ] Sin[β]},
{Cos[β] Sin[γ],Cos[γ],Sin[β] Sin[γ]},
{-Sin[β],0,Cos[β]}
}],
RuntimeAttributesListable
];
CartesianToSpherical[qvecs_] := CartesianToSphericalC[qvecs];
CartesianToSphericalC=Compile[{{vec,_Real,1}},
Module[{qx,qy,qz,R,θ,ϕ},
{qx,qy,qz} = vec; R = Sqrt[qx^2+qy^2+qz^2];
{qx,qy,qz} = {qx,qy,qz}/R;
If[qz<1-10^-8,
If[qz>-1+10^-8,
{θ,ϕ} = {ArcCos[qz/Sqrt[qx^2+qy^2+qz^2]],ArcTan[qx,qy]};,
{θ,ϕ} = {π,0};
];,
{θ,ϕ} = {0,0};
];
{R,θ,ϕ}
],
RuntimeAttributes->{Listable}
];
SHIndexj2l[j_] := Floor[Sqrt[j-1]];
SHIndexlm2j[l_,m_] := Round[(l^2+l+1)+m];
SHIndexj2m[j_] := Round[j-1-(SHIndexj2l[j])^2-SHIndexj2l[j]];
DSHTCreateM[orientations_,lMax_Integer] := Module[{Mmat,R,θ,ϕ},
{R,θ,ϕ} = CartesianToSpherical[orientations];
Mmat = Table[SphericalHarmonicY[SHIndexj2l[j],SHIndexj2m[j],θ,ϕ ],{j,1,(lMax+1)^2}];
Mmat
]
PseudoInverseiDSHT[orientations_,Lmax_Integer,values_] := values.Transpose[PseudoInverseiDSHT[orientations,Lmax]];
PseudoInverseiDSHT[orientations_,Lmax_Integer] := Module[{Mmat=DSHTCreateM[orientations,Lmax]},
PseudoInverse[Transpose[Mmat]]
]
SHAngularDiffusion[s_List,sigma_] := s.Transpose[SHAngularDiffusion[SHIndexj2l[Dimensions[s][[-1]]],sigma]];
SHAngularDiffusion[lMax_Integer,sigma_] := Module[{kt = 1/2 sigma^2},
(*If[E^(-lMax(lMax+1)kt)>0.01,Message[SHAngularDiffusion::nesh]];*)
DiagonalMatrix[Table[E^(-SHIndexj2l[jp](SHIndexj2l[jp]+1)kt),{jp,1,SHIndexlm2j[lMax,lMax]}]]
]
(*Create GaussianDerivative using gaussian filter*)
MGaussianDerivative[data_,σGaus_,der_] := GaussianFilter[data,{5σGaus,σGaus},der,Method->"Gaussian","Standardization"->False];
(*Apply a gaussian filter with size σGaus at each orientation. der is the derivative you want to take with {0,0,0} for blurring.*)
GaussianFilterAtOrientations[OS_,σGaus_,der_] := Transpose[Table[MGaussianDerivative[OS[[All,All,All,i]],σGaus,der],{i,1,Length[OS[[1,1,1]]]}],{4,1,2,3}];
(*Calculate the spatial gradient at each orientation by applygin GaussianFilterAtOrientations 3 times*)
SpatialGradientAtOrientations[OS_,σGaus_] := Map[GaussianFilterAtOrientations[OS,σGaus,#]&,{{1,0,0},{0,1,0},{0,0,1}}];
(*Calculate the elements of the spatial Hessian by applying gaussianfilter 6 times*)
SpatialHessianAtOrientations[OS_,σGaus_] := Module[{dxx,dxy,dxz,dyy,dyz,dzz},
dxx = GaussianFilterAtOrientations[OS,σGaus,{2,0,0}];
dxy = GaussianFilterAtOrientations[OS,σGaus,{1,1,0}];
dxz = GaussianFilterAtOrientations[OS,σGaus,{1,0,1}];
dyy = GaussianFilterAtOrientations[OS,σGaus,{0,2,0}];
dyz = GaussianFilterAtOrientations[OS,σGaus,{0,1,1}];
dzz = GaussianFilterAtOrientations[OS,σGaus,{0,0,2}];
{dxx,dxy,dxz,dyy,dyz,dzz}
]
HRegularizeAndPrepareSpatialDerivativesXYZ[s_, lMax_, sigmaSpatial_, sigmaAngle_] := Module[{sAngularlyBlurred, sV, pack = Developer`ToPackedArray, sGradientXYZ, sHessianXYZ},
(*Perform angular blurring*)
sAngularlyBlurred = SHAngularDiffusion[s, sigmaAngle];
(*Perform spatial blurring*)
sV = GaussianFilterAtOrientations[sAngularlyBlurred, sigmaSpatial, {0, 0, 0}];
(*Determine spatial derivatives in global coordinates x, y, z*)
sGradientXYZ = pack[SpatialGradientAtOrientations[sAngularlyBlurred, sigmaSpatial]];
sHessianXYZ = pack[SpatialHessianAtOrientations[sAngularlyBlurred, sigmaSpatial]];
{sV, sGradientXYZ, sHessianXYZ}
]
Options[CompiledSHTable] = {"PhiSymmetric" -> False};
CompiledSHTable[lMax_Integer, OptionsPattern[]] := Compile[{th, ph},
Evaluate[
If[OptionValue["PhiSymmetric"],
N[ExpToTrig[Table[If[SHIndexj2m[j] == 0, SphericalHarmonicY[SHIndexj2l[j], SHIndexj2m[j], th, ph], 0], {j, 1, (lMax+1)^2}]]],
N[ExpToTrig[Table[SphericalHarmonicY[SHIndexj2l[j], SHIndexj2m[j], th, ph], {j, 1, (lMax+1)^2}]]]
]
],
RuntimeAttributes -> Listable
];
CompiledSHA1A2A3[lMax_Integer, selection_:All] :=
With[{csht = CompiledSHTable[lMax], sel = selection/.{"A1"->1, "A2"->2, "A3"->3, All->{1, 2, 3}}},
(*Check option input*)
If[(!ContainsOnly[sel, {1, 2, 3}])||Depth[sel] != 2, Abort[]];
(*Compile function*)
Compile[{{Rn1, _Real, 2}, {sGradR3, _Complex, 2}},
Module[{n1 = Rn1.{0, 0, 1}, th, ph, A123},
(*Calculate spherical angles of n1*)
{th, ph} = CartesianToSphericalC[n1][[2;;3]];
(*Calculate first order spatial derivatives*)
A123 = Transpose[Rn1[[All, sel]]].(sGradR3.csht[th, ph])
],
RuntimeAttributes->Listable, CompilationOptions->{"InlineCompiledFunctions"->True, "InlineExternalDefinitions"->True}]
];
HHessianXYZToHessianA1A2A3CMatrix = Compile[{{sel, _Integer, 1}, {R, _Real, 2}},
Module[{R11 = R[[1, 1]], R12 = R[[1, 2]], R13 = R[[1, 3]], R21 = R[[2, 1]], R22 = R[[2, 2]], R23 = R[[2, 3]], R31 = R[[3, 1]], R32 = R[[3, 2]], R33 = R[[3, 3]]},
{
{R11^2, 2 R11 R21, 2 R11 R31, R21^2, 2 R21 R31, R31^2},
{R11 R12, R12 R21+R11 R22, R12 R31+R11 R32, R21 R22, R22 R31+R21 R32, R31 R32},
{R11 R13, R13 R21+R11 R23, R13 R31+R11 R33, R21 R23, R23 R31+R21 R33, R31 R33},
{R12^2, 2 R12 R22, 2 R12 R32, R22^2, 2 R22 R32, R32^2},
{R12 R13, R13 R22+R12 R23, R13 R32+R12 R33, R22 R23, R23 R32+R22 R33, R32 R33},
{R13^2, 2 R13 R23, 2 R13 R33, R23^2, 2 R23 R33, R33^2}
}[[sel]]
],
RuntimeAttributes->{Listable}
];
CompiledSHSpatialHessian[lMax_Integer, selection_:All] := With[{csht = CompiledSHTable[lMax], sel = selection/.{"A1A1"->1, "A1A2"->2, "A1A3"->3, "A2A2"->4, "A2A3"->5, "A3A3"->6, All->{1, 2, 3, 4, 5, 6}}},
(*Check option input*)
If[(!ContainsOnly[sel, {1, 2, 3, 4, 5, 6}])||Depth[sel] != 2, Abort[]];
(*Compile function*)
Compile[{{Rn1, _Real, 2}, {sHessianxyz, _Complex, 2}},
Module[{n1 = Rn1.{0, 0, 1}, th, ph, A11A12A13A22A23A33},
(*Calculate spherical angles of n1*)
{th, ph} = CartesianToSphericalC[n1][[2;;3]];
(*Calculate second order spatial derivatives*)
A11A12A13A22A23A33 = HHessianXYZToHessianA1A2A3CMatrix[sel, Rn1].(sHessianxyz.csht[th, ph])
],
RuntimeAttributes->Listable, CompilationOptions->{"InlineCompiledFunctions"->True, "InlineExternalDefinitions"->True}
]
];
Ytilde[l_, m_, p_,θ_,ϕ_] := ^(- p ϕ) SphericalHarmonicY[l, m+p,θ,ϕ];
k[l_, m_] := -2 (l^2 + l - m^2 );
j[l_, m_] := Sqrt[(l + m + 2) (l - m - 1) (l + m + 1) (l - m)];
h[l_, m_] := 2 m Sqrt[(l - m) (l + m)];
g[l_, m_] := Sqrt[(l - m - 2) (l - m - 1) (l - m) (l + m + 1)];
a[l_, m_] := Sqrt[(l + m) (l + m - 1)];
b[l_, m_] := Sqrt[(l - m) (l + m + 1)];
shA4[l_,m_,θ_,ϕ_] := * 1/2 Sqrt[(2 l + 1)/(2 l - 1)] (Ytilde[l - 1, m, - 1 ,θ,ϕ] a[l, m] + Ytilde[l - 1, m, + 1,θ,ϕ] a[l, -m]);
shA5[l_,m_,θ_,ϕ_]:= 1/2 (b[l, m] (Ytilde[l, m, + 1,θ,ϕ]) - b[l, -m] (Ytilde[l, m, - 1,θ,ϕ]) );
shA44[l_,m_,θ_,ϕ_]:= -l (l + 1) SphericalHarmonicY[l, m,θ,ϕ] - shA55[l, m ,θ,ϕ];
shA45[l_,m_,θ_,ϕ_]:= (Sqrt[2 l + 1])/ (4 Sqrt[2 l - 1]) (h[l, m] SphericalHarmonicY[l - 1, m,θ,ϕ] - g[l, -m] Ytilde[l - 1, m, -2,θ,ϕ] + g[l, m] Ytilde[l - 1, m, +2,θ,ϕ]);
shA55[l_,m_,θ_,ϕ_] := 1/4 (k[l, m] Ytilde[l, m,0,θ,ϕ] + j[l, -m] Ytilde[l, m, -2,θ,ϕ] + j[l, m] Ytilde[l, m, +2,θ,ϕ] );
SHA4[lMax_Integer, θ_, ϕ_] := Module[{M,beta,gamma},
Table[shA4[SHIndexj2l[jp],SHIndexj2m[jp], θ, ϕ],{jp,1,SHIndexlm2j[lMax,lMax]}]
]
SHA5[lMax_Integer, θ_, ϕ_] := Module[{M,beta,gamma},
Table[shA5[SHIndexj2l[jp],SHIndexj2m[jp], θ, ϕ],{jp,1,SHIndexlm2j[lMax,lMax]}]
]
SHA44[lMax_Integer, θ_, ϕ_] := Module[{M,beta,gamma},
Table[shA44[SHIndexj2l[jp],SHIndexj2m[jp], θ, ϕ],{jp,1,SHIndexlm2j[lMax,lMax]}]
]
SHA55[lMax_Integer, θ_, ϕ_] := Module[{M,beta,gamma},
Table[shA55[SHIndexj2l[jp],SHIndexj2m[jp], θ, ϕ],{jp,1,SHIndexlm2j[lMax,lMax]}]
]
SHA45[lMax_Integer, θ_, ϕ_] := Module[{M,beta,gamma},
Table[shA45[SHIndexj2l[jp],SHIndexj2m[jp], θ, ϕ],{jp,1,SHIndexlm2j[lMax,lMax]}]
]
CompiledSHA4[lMax_Integer] := Compile[{th,ph},
Evaluate[SHA4[lMax, th, ph]],
RuntimeAttributesListable
];
CompiledSHA5[lMax_Integer] := Compile[{th,ph},
Evaluate[SHA5[lMax, th, ph]],
RuntimeAttributesListable
];
CompiledSHA44[lMax_Integer] := Compile[{th,ph},
Evaluate[SHA44[lMax, th, ph]],
RuntimeAttributesListable
];
CompiledSHA45[lMax_Integer] := Compile[{th,ph},
Evaluate[SHA45[lMax, th, ph]],
RuntimeAttributesListable
];
CompiledSHA55[lMax_Integer] := Compile[{th,ph},
Evaluate[SHA55[lMax, th, ph]],
RuntimeAttributesListable
];
SHRotateZYZ[gamma_,beta_,alpha_,s_List] := s.Transpose[SHRotateZYZ[gamma,beta,alpha,SHIndexj2l[Dimensions[s][[-1]]]]];
SHRotateZYZ[gamma_,beta_,alpha_,lMax_Integer] := Module[{M},
M = ConstantArray[0,{SHIndexlm2j[lMax,lMax],SHIndexlm2j[lMax,lMax]}];
Table[Table[(M[[jp,SHIndexlm2j[SHIndexj2l[jp],mp]]]=WignerD[{SHIndexj2l[jp],SHIndexj2m[jp],mp},-gamma,-beta,-alpha]),{mp,-SHIndexj2l[jp],SHIndexj2l[jp]}],{jp,1,SHIndexlm2j[lMax,lMax]}];
M
]
RToAlphaBetaGamma=Compile[{{R,_Real,2}},
Module[{γ,β,α,cb},
cb=Chop[R[[3,3]]];
If[cb<1-10^-8,
If[cb>-1+10^-8,
β = ArcCos[cb];
γ = ArcTan[R[[1,3]],R[[2,3]]];
α = ArcTan[-R[[3,1]],R[[3,2]]];,
γ = 0; β = π; α = ArcTan[R[[2,2]],R[[2,1]]];
],
γ=β =0;α=ArcTan[R[[1,1]],R[[2,1]]];
];
{γ,β,α}
],RuntimeAttributes->{Listable}
]
SHRotateR[R_,s_List] := s.Transpose[SHRotateR[R,SHIndexj2l[Dimensions[s][[-1]]]]];
SHRotateR[R_,lMax_Integer] := Module[{M,j,l,m,beta,gamma,alpha},
{gamma,beta,alpha}=RToAlphaBetaGamma[R];
SHRotateZYZ[gamma,beta,alpha,lMax]]
Unprotect[Rez,Rey,Rex,ex,ey,ez]
ez={0,0,1};
ey={0,1,0};
ex={1,0,0};
Rez[α_] := RotationMatrix[α, ez];
Rey[γ_] := RotationMatrix[γ, ey];
Rex[β_] := RotationMatrix[β, ex];
Protect[Rez,Rey,Rex,ex,ey,ez]
RotateZYAngles=Compile[{{β,_Real},{γ,_Real}},
{
{Cos[β] Cos[γ],-Sin[γ],Cos[γ] Sin[β]},
{Cos[β] Sin[γ],Cos[γ],Sin[β] Sin[γ]},
{-Sin[β],0,Cos[β]}
},
RuntimeAttributesListable
];
CompiledSHA4A5[lMax_Integer, selection_:All] :=
With[{csh4 = CompiledSHA4[lMax], csh5 = CompiledSHA5[lMax], Sey = SHRotateR[Rey[-π/2], lMax], Ry = Rey[π/2], ez = {0, 0, 1}, sel = selection/.{"A4"->1, "A5"->2, All->{1, 2}}},
(*Check option input*)
If[(!ContainsOnly[sel, {1, 2}])||Depth[sel] != 2, Abort[]];
(*Compile function*)
Compile[{{Rn1, _Real, 2}, {s, _Complex, 1}},
Module[{n1 = Rn1.ez, closeToEz, th, ph, A4, A5, RalphaTilde, Rnα0, n2},
(*Calculate spherical angles*)
{th, ph} = CartesianToSphericalC[n1][[2;;3]];
Rnα0 = RotateZYAngles[th, ph];
(*Calculate alpha difference RalphaTilde*)
RalphaTilde = Transpose[Rnα0].Rn1;
(*Calculate first order angular derivatives*)
A4 = s.csh4[th, ph];
A5 = s.csh5[th, ph];
(*Rotate using RalphaTilde*)
(RalphaTilde[[1;;2, 1;;2]].{A4, A5})[[sel]]
],
RuntimeAttributes->Listable, CompilationOptions->{"InlineCompiledFunctions"->True, "InlineExternalDefinitions"->True}]
];
CompiledSHA44A45A55[lMax_Integer, selection_:All] :=
With[{csh44 = CompiledSHA44[lMax], csh45 = CompiledSHA45[lMax], csh55 = CompiledSHA55[lMax], Sey = SHRotateR[Rey[-π/2], lMax], Ry = Rey[π/2], ez = {0, 0, 1}, sel = selection/.{"A4A4"->1, "A4A5"->2, "A5A5"->4, All->{1, 2, 4}}},
(*Check option input*)
If[(!ContainsOnly[sel, {1, 2, 4}])||Depth[sel] != 2, Abort[]];
(*Compile function*)
Compile[{{Rn1, _Real, 2}, {s, _Complex, 1}},
Module[{n1 = Rn1.ez, th, ph, A44, A45, A55, RalphaTilde, Rnα0},
(*Calculate spherical angles*)
{th, ph} = CartesianToSphericalC[n1][[2;;3]];
Rnα0 = RotateZYAngles[th, ph];
(*Calculate alpha difference RalphaTilde*)
RalphaTilde = Transpose[Rnα0].Rn1;
(*Calculate second order angular derivatives*)
A44 = s.csh44[th, ph];
A45 = s.csh45[th, ph];
A55 = s.csh55[th, ph];
(*Rotate using RalphaTilde*)
Flatten[(RalphaTilde[[1;;2, 1;;2]]).{{A44, A45}, {A45, A55}}.(Transpose[RalphaTilde][[1;;2, 1;;2]]), 1][[sel]]
],
RuntimeAttributes->Listable, CompilationOptions->{"InlineCompiledFunctions"->True, "InlineExternalDefinitions"->True}]
];
CompiledSHMixedDerivativesFromGradientR3[lMax_Integer, selection_:All] :=
With[{csh4 = CompiledSHA4[lMax], csh5 = CompiledSHA5[lMax], Sey = SHRotateR[Rey[-π/2], lMax], Ry = Rey[π/2], ez = {0, 0, 1}, sel = selection/.{"A1A4"->1, "A2A4"->2, "A3A4"->3, "A1A5"->4, "A2A5"->5, "A3A5"->6, All->{1, 2, 3, 4, 5, 6}}},
(*Check option input*)
If[(!ContainsOnly[sel, {1, 2, 3, 4, 5, 6}])||Depth[sel] != 2, Abort[]];
(*Compile function*)
Compile[{{Rn1, _Real, 2}, {sGradR3, _Complex, 2}},
Module[{n1 = Rn1.ez, th, ph, A4, A5, RalphaTilde, Rnα0},
(*Calculate spherical angles*)
{th, ph} = CartesianToSphericalC[n1][[2;;3]];
Rnα0 = RotateZYAngles[th, ph];
(*Calculate alpha difference RalphaTilde*)
RalphaTilde = Transpose[Rnα0].Rn1;
(*Calculate first order angular derivatives*)
A4 = sGradR3.csh4[th, ph];
A5 = sGradR3.csh5[th, ph];
(*Rotate using RalphaTilde*)
Flatten[RalphaTilde[[1;;2, 1;;2]].{A4, A5}.(Rn1)][[sel]]
],
RuntimeAttributes->Listable, CompilationOptions->{"InlineCompiledFunctions"->True, "InlineExternalDefinitions"->True}]
];
HCalculateDerivatives::usage = "HCalculateDerivatives[s,\!\(\*SuperscriptBox[\(s\), \(∇\)]\),\!\(\*SuperscriptBox[\(s\), \(H\)]\), R, L , derivativeList] calculates the derivatives specified by derivativeList from s(x,·): the spherical harmonic coefficients of V(x,·), \!\(\*SuperscriptBox[\(s\), \(∇\)]\)(·,x,·): the spherical harmonic coefficients of \!\(\*SubscriptBox[\(∇\), SuperscriptBox[\(\), \(3\)]]\)V(x,·), \!\(\*SuperscriptBox[\(s\), \(H\)]\)(·,x,·): the spherical harmonic coefficients of \!\(\*SubscriptBox[\(H\), SuperscriptBox[\(R\), \(3\)]]\)V(x,·) and list of 3D rotations R\nInput should have the following dimensions [s]={\!\(\*SubscriptBox[\(N\), \(pos\)]\),j(L,L)}, [\!\(\*SuperscriptBox[\(s\), \(∇\)]\)]={3, \!\(\*SubscriptBox[\(N\), \(pos\)]\),j(L,L)}, [\!\(\*SuperscriptBox[\(s\), \(H\)]\)]={6,\!\(\*SubscriptBox[\(N\), \(pos\)]\),j(L,L)}, [R]={\!\(\*SubscriptBox[\(N\), \(pos\)]\),\!\(\*SubscriptBox[\(N\), \(o\)]\),3,3}, and derivativeList should be a list containing all or a subset of {'A1','A2','A3','A1A1','A1A2','A1A3','A2A2','A2A3','A3A3','A4','A5','A4A4','A4A5','A5A5','A1A4','A2A4','A3A4','A1A5','A2A5','A3A5'}";
HCalculateDerivatives[sV_, sGradientXYZ_, sHessianXYZ_, Rn_, lMax_, derList_] := Module[{mixedDer, firstOrderSpatialDerivatives, secondOrderSpatialDerivatives, firstOrderAngularDerivatives, secondOrderAngularDerivatives, mixedDerivatives, A1A2A3, A4A5, A44A45A55, A11A12A13A22A23A33},
firstOrderSpatialDerivatives = Intersection[derList, {"A1", "A2", "A3"}];
If[firstOrderSpatialDerivatives =!= {},
t = AbsoluteTiming[A1A2A3 = Chop[Transpose[CompiledSHA1A2A3[lMax, firstOrderSpatialDerivatives][Rn, Transpose[sGradientXYZ]], {2, 3, 1}]];][[1]];
Print["Derivative(s)" <> StringRiffle[firstOrderSpatialDerivatives, {"(", ", ", ")"}] <> " calculated (" <>ToString[t]<>"s)"];
];
secondOrderSpatialDerivatives = Intersection[derList, {"A1A1", "A1A2", "A1A3", "A2A2", "A2A3", "A3A3"}];
If[secondOrderSpatialDerivatives =!= {},
t = AbsoluteTiming[A11A12A13A22A23A33 = Chop[Transpose[CompiledSHSpatialHessian[lMax, secondOrderSpatialDerivatives][Rn, Transpose[sHessianXYZ]], {2, 3, 1}]];][[1]];
Print["Derivative(s)" <> StringRiffle[secondOrderSpatialDerivatives, {"(", ", ", ")"}] <> " calculated (" <>ToString[t]<>"s)"];
];
firstOrderAngularDerivatives = Intersection[derList, {"A4", "A5"}];
If[firstOrderAngularDerivatives =!= {},
t = AbsoluteTiming[A4A5 = Chop[Transpose[CompiledSHA4A5[lMax, firstOrderAngularDerivatives][Rn, sV], {2, 3, 1}]];][[1]];
Print["Derivative(s)" <> StringRiffle[firstOrderAngularDerivatives, {"(", ", ", ")"}] <> " calculated (" <>ToString[t]<>"s)"];
];
secondOrderAngularDerivatives = Intersection[derList, {"A4A4", "A4A5", "A5A5"}];
If[secondOrderAngularDerivatives =!= {},
t = AbsoluteTiming[A44A45A55 = Chop[Transpose[CompiledSHA44A45A55[lMax, secondOrderAngularDerivatives][Rn, sV], {2, 3, 1}]];][[1]];
Print["Derivative(s)" <> StringRiffle[secondOrderAngularDerivatives, {"(", ", ", ")"}] <> " calculated (" <>ToString[t]<>"s)"];
];
mixedDerivatives = Intersection[derList, {"A1A4", "A2A4", "A3A4", "A1A5", "A2A5", "A3A5"}];
If[mixedDerivatives =!= {},
t = AbsoluteTiming[mixedDer = Transpose[CompiledSHMixedDerivativesFromGradientR3[lMax, mixedDerivatives][Rn, Transpose@sGradientXYZ], {2, 3, 1}];][[1]];
Print["Derivative(s)" <> StringRiffle[mixedDerivatives, {"(", ", ", ")"}] <> " calculated (" <>ToString[t]<>"s)"];
];
Chop[derList /.Join[
If[firstOrderSpatialDerivatives =!= {}, MapThread[#1->#2&, {firstOrderSpatialDerivatives, A1A2A3}], {}],
If[secondOrderSpatialDerivatives =!= {}, MapThread[#1->#2&, {secondOrderSpatialDerivatives, A11A12A13A22A23A33}], {}],
If[firstOrderAngularDerivatives =!= {}, MapThread[#1->#2&, {firstOrderAngularDerivatives, A4A5}], {}],
If[secondOrderAngularDerivatives =!= {}, MapThread[#1->#2&, {secondOrderAngularDerivatives, A44A45A55}], {}],
If[mixedDerivatives =!= {}, MapThread[#1->#2&, {mixedDerivatives, mixedDer}], {}]
]]
];
LeftInvariantHessianUsingSphericalHarmonics[oso_/;Head[oso]===Obj3DPositionOrientationData, lMax_,σInternal_] := LeftInvariantHessianUsingSphericalHarmonics[oso["Data","Real"], oso[["Wavelets"]][["OrientationList"]], lMax,σInternal]
LeftInvariantHessianUsingSphericalHarmonics[OS_, orientations_, lMax_,σInternal_] := Module[{Rn, A11,A12,A13,A22,A23,A33, A34, A35, A44, A45, A55, A1, A2,A14,A24,A3,A15,A25,A4,A5, A6, hessian, σSpat, σAng,sV, sGradientXYZ, sHessianXYZ,s,dim,R},
{σSpat, σAng} = σInternal;
(*Initialize rotation matrices*)
Rn = Map[RotateZY[Sequence@@#]&, orientations];
(*Calculate spherical harmonic coeffiecients*)
t = AbsoluteTiming[s = PseudoInverseiDSHT[orientations, lMax, OS];][[1]];
Print["Spherical Harmonic Transform performed (" <>ToString[t]<>"s)"];
(*Calculate first order and second order spatial derivatives*)
t = AbsoluteTiming[{sV, sGradientXYZ, sHessianXYZ} = HRegularizeAndPrepareSpatialDerivativesXYZ[s, lMax, σSpat, σAng];][[1]];
Print["Spatial Derivatives Calculated (" <>ToString[t]<>"s)"];
(*Flatten dimensions*)
dim = Dimensions[OS];
R = Flatten[ConstantArray[Rn, dim[[1;;3]]], 2];
sHessianXYZ = Transpose@Flatten[Transpose[sHessianXYZ, {4, 1, 2, 3, 5}], 2];
sGradientXYZ = Transpose@Flatten[Transpose[sGradientXYZ, {4, 1, 2, 3, 5}], 2];
sV = Flatten[sV, 2];
(*Calculate derivatives*)
{A11,A12,A13,A22,A23,A33, A34, A35, A44, A45, A55, A1, A2,A4,A5,A14,A24,A3,A15,A25} = HCalculateDerivatives[sV, sGradientXYZ, sHessianXYZ, R, lMax, {"A1A1","A1A2","A1A3","A2A2","A2A3","A3A3", "A3A4", "A3A5", "A4A4", "A4A5", "A5A5", "A1", "A2", "A4", "A5","A1A4","A2A4","A3","A1A5","A2A5"}];
A6 = 0*A1;
(*Build Hessian*)
hessian = Transpose[
Developer`ToPackedArray@{
{A11, A12, A13, A14, A15-A3, A2 },
{A12, A22, A23, A24+A3, A25, -A1 },
{A13, A23, A33, A34-A2, A35+A1, A6 },
{A14, A24, A34, A44, A45, A5 },
{A15, A25, A35, A45, A55, -A4 },
{A6, A6, A6, A6, A6, A6 }
},{3,4,1,2}
];
ArrayReshape[hessian,Join[dim,{6,6}]]
]
HesAToHesB = Compile[{{hes, _Real, 2}, {R, _Real, 2}}, R.hes.Transpose[R], RuntimeAttributes{Listable}];
Structureness[os_, RGaugeFrame_, σInternal_,lMax_] := Module[{hes,hesB,B11,B22,B33,B44,B55,B66,str},
hes = LeftInvariantHessianUsingSphericalHarmonics[os["FullData","Real"], os[["Wavelets"]]["FullOrientationList"], lMax,σInternal];
hesB = HesAToHesB[hes,RGaugeFrame];
{B11,B22,B33,B44,B55,B66} = Table[hesB〚All,All,All,All,i,i〛,{i,1,6}];
str = -(B11+B22+B44+B55+B66);
str
]
Left Invariant Diffusion in the direction of the Gauge Frames
ExponentialCurveSE3PositionAndOrientationAtgC = Compile[{{c, _Real, 1}, {x, _Real, 1}, {R, _Real, 2}, {t, _Real}},
Module[{q, c1, Ω, x1, n1},
q = Norm[c[[4;;6]]];
Ω = ({{0, -c[[6]], c[[5]]}, {c[[6]], 0, -c[[4]]}, {-c[[5]], c[[4]], 0}});
c1 = {c[[1]], c[[2]], c[[3]]};
x1 = If[q == 0, t*c1, t*c1+(1-Cos[q*t])/q^2 Ω.c1+(t/q^2-Sin[q*t]/q^3) Ω.Ω.c1];
n1 = If[q == 0, {0, 0, 1}, {0, 0, 1}+Sin[q*t]/q( Ω[[All, 3]])+(1-Cos[q*t])/q^2 (Ω.Ω)[[All, 3]]];
{R.x1+x, R.n1}
], RuntimeAttributes->Listable
];
SpatialInterpolationFactors = Compile[{{pos, _Real, 1}},
Module[{interPolationFactors, rest, x,y,z},
rest = pos - Floor[pos];
{x, y, z} = rest;
interPolationFactors = {
(1-x) (1-y) (1-z),
(1-x) (1-y) z,
(1-x) y (1-z),
(1-x) y z,
x (1-y) (1-z),
x (1-y) z,
x y (1-z),
x y z
}
], RuntimeAttributes -> {Listable}
];
Inverse3x3C = Compile[{{mat3x3, _Real, 2}},
Module[{a, b, c, d, e, f, g, h, i, det},
{{a, b, c}, {d, e, f}, {g, h, i}} = mat3x3;
det = -c e g+b f g+c d h-a f h-b d i+a e i;
{
{(-f h+e i)/det, (c h-b i)/det, (-c e+b f)/det},
{(f g-d i)/det, (-c g+a i)/det, (c d-a f)/det},
{(-e g+d h)/det, (b g-a h)/det, (-b d+a e)/det}
}
]
];
Triangles[orientations_List, topology_List] := Triangles[orientations, topology] = Map[orientations[[#]]&, topology, {2}];
JoinedTriangles[orientations_List, topology_List] := JoinedTriangles[orientations, topology] = Position[topology, elem_/;elem == #][[All, 1]]&/@Range[Length[orientations]];
CrossProducts[triangles_List] := CrossProducts[triangles] = Map[{#[[1]]#[[2]], #[[2]]#[[3]], #[[3]]#[[1]]}&, triangles, {1}];
Sides[triangles_List] := Sides[triangles] = Map[{Sign[#[[1]]#[[2]].#[[3]]], Sign[#[[2]]#[[3]].#[[1]]], Sign[#[[3]]#[[1]].#[[2]]]}&, triangles, {1}];
IndexNearestOrientationC = Compile[{{n, _Real, 1}, {orientations, _Real, 2}},
Module[{nearest, i, d, mind},
d = Map[Norm[# - n] &, orientations];
mind = Min[d];
i = Position[d, mind][[1, 1]];
If[i >= 1, i, 1]]
];
AngularInterpolationFactors[or_List, orientations_, topology_] := Module[{triangles = Triangles[orientations, topology], joinedtriangles = JoinedTriangles[orientations, topology], crossproducts, sides, maxLength},
maxLength = Max[Map[Length, joinedtriangles]];
joinedtriangles = Map[ArrayPad[#, {0, maxLength-Length[#]}]&, joinedtriangles];
crossproducts = CrossProducts[triangles];
sides = N[Sides[triangles]];
AngularInterpolationFactorsPreComputedC[or, orientations, topology, crossproducts, triangles, joinedtriangles, sides]
]
AngularInterpolationFactorsPreComputedC = Compile[{{or, _Real, 1}, {orientations, _Real, 2}, {topology, _Integer, 2}, {crossproducts, _Real, 3}, {triangles, _Real, 3}, {joinedtriangles, _Integer, 2}, {sides, _Real, 2}},
Module[{range, e1, e2, u, row, triangle, triangleid, pos, iNearest, indices, weights},
iNearest = IndexNearestOrientationC[or, orientations];
If[MemberQ[orientations, or],
indices = {iNearest, iNearest, iNearest};
weights = {1., 0., 0.};
,
(*Select possible triangles by finding triangles connected to the nearest orientation*)
range = joinedtriangles[[iNearest]];
(*Select triangle*)
pos = 1;
While[pos<Length[range]&&range[[pos]] != 0 && (UnitStep[crossproducts[[range[[pos]], All, #]].or]*sides[[range[[pos]], #]]&/@Range[3]) != {1, 1, 1},
pos++];
triangleid = range[[pos]];
(*Calculate weights and indices*)
triangle = triangles[[triangleid]];
e1 = triangle[[2]]-triangle[[1]];
e2 = triangle[[3]]-triangle[[1]];
u = Inverse3x3C[{e1, e2, or}].(or-triangle[[1]]);
weights = {(1.-u[[1]]-u[[2]]), u[[1]], u[[2]]};
indices = topology[[triangleid]];
];
{indices, weights}
], RuntimeAttributes->Listable, CompilationOptions -> {"InlineExternalDefinitions" -> True, "InlineCompiledFunctions" -> True}
];
PrepareInterpolationStep[c_, h_, orientations_, topology_] := Module[{Rn, step, pos, or, floorsS, factS, res, factA, indicesA},
(*Initialize rotation matrices*)
Rn = Map[RotateZY[Sequence@@#]&, orientations];
(*Determine orientation and position of step over exponential curve*)
step = MapIndexed[ExponentialCurveSE3PositionAndOrientationAtgC[#1, #2[[1;;3]], Rn, h]&, c, {3}];
or = step[[All, All, All, All, 2]];
pos = step[[All, All, All, All, 1]]+1;
(*Calculate floor and spatial interpolation stencil*)
floorsS = Floor[pos];
factS = SpatialInterpolationFactors[pos];
(*Calculate indices of the vertices used in interpolation and calculate angular interpolation stencil*)
res = AngularInterpolationFactors[or, orientations, topology];
factA = res[[All, All, All, All, 2]];
indicesA = Round[res[[All, All, All, All, 1]]];
{floorsS, indicesA, factS, factA}
]
PrepareInterpolation[c_, h_, orientations_, topology_] := Module[{intFactorsAndIndicesF, intFactorsAndIndicesB},
intFactorsAndIndicesF = PrepareInterpolationStep[c, h, orientations, topology];
intFactorsAndIndicesB = PrepareInterpolationStep[c, -h, orientations, topology];
{intFactorsAndIndicesF, intFactorsAndIndicesB}
]
ExplicitIntegration[U_, Q_, t_List, Δt_] := Module[{output = U, i = 1,tEnd = t〚-1〛,tCurrent,outputAll = {}},
For[tCurrent = 0, tCurrent ≤ tEnd, tCurrent+= Δt,
(*See if current endtime has been reached*)
If[tCurrent + $MachineEpsilon ≥ t〚i〛, AppendTo[outputAll,output]; i++];
(*Perform diffusion step*)
output = output+Δt*Q[output];
];
AppendTo[outputAll,output];
Return[outputAll]
]
ExplicitIntegration[U_, Q_, t_, Δt_] := ExplicitIntegration[U, Q, {t}, Δt]〚1〛;
AngularStepsizeCheck[intf_] := Module[{allInterpolationContainIndex},
allInterpolationContainIndex = Map[Intersection[#]&, Transpose[Flatten[Transpose[Flatten[intf[[All, 2]], 3], {2, 3, 1}], 1]]];
And@@MapIndexed[MemberQ[#1, #2[[1]]]&, allInterpolationContainIndex]
]
LinearInterpolateOSFactorsPrecalculatedC = Compile[{{data, _Real, 4}, {floors, _Integer, 1}, {indices, _Integer, 1}, {interPolationFactors, _Real, 1}, {interPolationFactorsAngular, _Real, 1}},
Module[{dataDim, dataAtIntegerIndices, spatInterPolatedData, interPolatedData, rest, res},
dataAtIntegerIndices = Flatten[data[[floors[[1]] ;; floors[[1]] + 1, floors[[2]] ;; floors[[2]] + 1, floors[[3]] ;; floors[[3]] + 1, indices]], 2];
spatInterPolatedData = Total[dataAtIntegerIndices*interPolationFactors];
interPolatedData = spatInterPolatedData.interPolationFactorsAngular;
interPolatedData
], RuntimeAttributes -> {Listable}, CompilationOptions -> {"InlineExternalDefinitions" -> True, "InlineCompiledFunctions" -> True}
];
GroupDifferenceExponentialCurvePrepared[U_, preparedInterpolationFactors_, h_] := Module[{Upad, Uf, Ub},
Upad = ArrayPad[U, 1, "Reversed"][[All, All, All, 2;;-2]];
Uf = LinearInterpolateOSFactorsPrecalculatedC[Upad, Sequence@@preparedInterpolationFactors[[1]]];
Ub = LinearInterpolateOSFactorsPrecalculatedC[Upad, Sequence@@preparedInterpolationFactors[[2]]];
(Ub-2U+Uf)/(2h)^2
]
LIDGAUGE::stabilitycriterion = "Old stability criterion (for non gauge case) is still used";
LIDGAUGE::spatstepLarge = "Spatial stepsize is larger than 1 pixel";
LIDGAUGE::angstepLarge = "Angular stepsize too large (point used in interpolation does not lie in connected mesh triangle)";
Options[LeftInvariantDiffusionGauge] = {DeltaT->Automatic, "StepSize"->0.8};
LeftInvariantDiffusionGauge[os_/;Head[os]===Obj3DPositionOrientationData, RG_, D11_, D33_, D44_, t_/;NumberQ[t], muFrame_, opt___:OptionsPattern[]] := LeftInvariantDiffusionGauge[os, RG, D11, D33, D44, {t}, muFrame, opt]〚1〛;
LeftInvariantDiffusionGauge[os_/;Head[os]===Obj3DPositionOrientationData, RG_, D11_, D33_, D44_, t_List, muFrame_, opt___:OptionsPattern[]] := Module[
{dataDif, orientations = os[["Wavelets"]]["FullOrientationList"], topology = os[["Wavelets"]]["FullTopology"]},
dataDif = LeftInvariantDiffusionGauge[os["FullData","Real"], orientations, topology, RG, D11, D33, D44, t, muFrame, opt];
Affix[os,"Data" #]&/@dataDif
]
LeftInvariantDiffusionGauge[U_List, orientations_List, topology_List, RG_, D11_, D33_, D44_, t_, muFrame_, OptionsPattern[]] :=
Module[{integrator, Q, StabilityCriterion, dt = OptionValue["DeltaT"], spatialstepsizeMax, angularstepsizeMax, h = OptionValue["StepSize"], intF1, intF2, intF3, intF4, intF5, intF6},
(*Message[LIDGAUGE::stabilitycriterion];*)
If[(h*Max@Sqrt[(Total[(Flatten[RG, Depth[RG]-3][[All, 1;;3]])^2, {2}])])>0.999, Message[LIDGAUGE::spatstepLarge]];
(*mu-orthogonal frame*)
spatialstepsizeMax = h/muFrame; (*Stepsize in pixels for pure spatial step*)
angularstepsizeMax = h;(*Angular stepsize for pure angular step*)
(*(*Other frame*)
spatialstepsizeMax = h*Max@Sqrt[(Total[(Flatten[RG, Depth[RG]-3]〚All, 1;;3〛)^2, {2}])];
angularstepsizeMax = h*Max@Sqrt[(Total[(Flatten[RG, Depth[RG]-3]〚All, 4;;6〛)^2, {2}])];*)
(*Set dt to be equal to the stability bound if it is not specified in advance, otherwise use user input value*)
StabilityCriterion = 1/((2 Max[D33]/muFrame^2 + 4 Max[D11]/muFrame^2)/spatialstepsizeMax^2+(4Max[D44])/angularstepsizeMax^2);
If[dt == Automatic, dt = StabilityCriterion];
(*Print grid with stepsizes*)
Print[
Grid[{{"Maximum Spatial stepsize", spatialstepsizeMax},
{"Maximum Angular stepsize", angularstepsizeMax},
{"Timestep", dt}}]];
(*Choose integrator*)
integrator = ExplicitIntegration[#1, #2, #3, #4]&;
If[dt>StabilityCriterion && integrator === (ExplicitIntegration[#1, #2, #3, #4]&),
Message[ContourEnhancement::instable, StabilityCriterion]
];
(*Prepare interpolationfactors*)
intF1 = If[D11 =!= 0, (PrepareInterpolation[RG[[All, All, All, All, 1]], h, orientations, topology]), 0];
intF2 = If[D11 =!= 0, (PrepareInterpolation[RG[[All, All, All, All, 2]], h, orientations, topology]), 0];
intF3 = If[D33 =!= 0, (PrepareInterpolation[RG[[All, All, All, All, 3]], h, orientations, topology]), 0];
intF4 = If[D44 =!= 0, (PrepareInterpolation[RG[[All, All, All, All, 4]], h, orientations, topology]), 0];
intF5 = If[D44 =!= 0, (PrepareInterpolation[RG[[All, All, All, All, 5]], h, orientations, topology]), 0];
intF6 = If[D44 =!= 0, (PrepareInterpolation[RG[[All, All, All, All, 6]], h, orientations, topology]), 0];
(*If[!And@@Map[AngularStepsizeCheck, {intF1, intF2, intF3, intF4, intF5, intF6}], Message[LIDGAUGE::angstepLarge]];*)
(*Form the Q-function needed by the integrators. Note this is only done symbolically*)
Q[W_] := (
If[D11 === 0, 0, D11 (GroupDifferenceExponentialCurvePrepared[W, intF1, h]
+ GroupDifferenceExponentialCurvePrepared[W, intF2, h])
]
+ If[D33 === 0, 0, D33 GroupDifferenceExponentialCurvePrepared[W, intF3, h]]
+ If[D44 === 0, 0, D44 (GroupDifferenceExponentialCurvePrepared[W, intF4, h]
+ GroupDifferenceExponentialCurvePrepared[W, intF5, h]
+ GroupDifferenceExponentialCurvePrepared[W, intF6, h])
]);
(*Do actual diffusion and return result*)
Return[integrator[U, Q, t, dt]]
]
Left Invariant Gradient
LeftInvariantGradientUsingSphericalHarmonics[oso_/;Head[oso]===Obj3DPositionOrientationData, lMax_,σInternal_] := LeftInvariantGradientUsingSphericalHarmonics[oso["FullData","Real"], oso[["Wavelets"]]["FullOrientationList"], lMax,σInternal];
LeftInvariantGradientUsingSphericalHarmonics[OS_, orientations_, lMax_,σInternal_] := Module[{Rn, A1,A2,A3,A4,A5,A6, hessian, σSpat, σAng,sV, sGradientXYZ, sHessianXYZ,s,dim,R},
{σSpat, σAng} = σInternal;
(*Initialize rotation matrices*)
Rn = Map[RotateZY[Sequence@@#]&, orientations];
(*Calculate spherical harmonic coeffiecients*)
t = AbsoluteTiming[s = PseudoInverseiDSHT[orientations, lMax, OS];][[1]];
Print["Spherical Harmonic Transform performed (" <>ToString[t]<>"s)"];
(*Calculate first order and second order spatial derivatives*)
t = AbsoluteTiming[{sV, sGradientXYZ, sHessianXYZ} = HRegularizeAndPrepareSpatialDerivativesXYZ[s, lMax, σSpat, σAng];][[1]];
Print["Spatial Derivatives Calculated (" <>ToString[t]<>"s)"];
(*Flatten dimensions*)
dim = Dimensions[OS];
R = Flatten[ConstantArray[Rn, dim[[1;;3]]], 2];
sHessianXYZ = Transpose@Flatten[Transpose[sHessianXYZ, {4, 1, 2, 3, 5}], 2];
sGradientXYZ = Transpose@Flatten[Transpose[sGradientXYZ, {4, 1, 2, 3, 5}], 2];
sV = Flatten[sV, 2];
(*Calculate derivatives*)
{A1,A2,A3,A4,A5} = HCalculateDerivatives[sV, sGradientXYZ, sHessianXYZ, R, lMax, {"A1","A2","A3","A4","A5"}];
A6 = 0*A1;
(*Build Hessian*)
hessian = Transpose[Developer`ToPackedArray@{A1,A2,A3,A4,A5,A6},{3,1,2}];
ArrayReshape[hessian,Join[dim,{6}]]
]
GradAToGradB = Compile[{{grad, _Real, 1}, {R, _Real, 2}}, R.grad, RuntimeAttributes{Listable}];
V3D Import and Export Functions (for AIXIA viewer)
LoadAndPartitionDataV3D[if_, zdim_,ydim_,xdim_,bitDepth_] := Module[{data, type = Switch[bitDepth, 16, "UnsignedInteger16", 32,"UnsignedInteger32",_,"UnsignedInteger16"]},
data = ArrayReshape[
BinaryReadList[if, type, zdim*ydim*xdim],
{zdim, ydim, xdim}];
data
]
LoadDataV3D[fn_] := Module[{if,isFiltered,zdim, ydim, xdim,data, voxelSize, bitDepth,percentage, centerPosition, metaData, version},
if = OpenRead[fn, BinaryFormat -> True];
(*Import version*)
version = StringJoin@BinaryReadList[if, "Character8", 40];
(*Import data dimension*)
{xdim, ydim, zdim} = BinaryReadList[if, "UnsignedInteger32", 3];
(*Import voxels size*)
voxelSize = BinaryReadList[if, "Real64", 3];
(*Import data center*)
centerPosition = BinaryReadList[if, "Real64", 3];
(*Import BitDepth*)
bitDepth = BinaryRead[if, "UnsignedInteger32"];
(*Import percentage ???? Nobody knows what it is ???? *)
percentage = BinaryRead[if, "UnsignedInteger32"];
(*Import slope and intercept*)
isFiltered = BinaryRead[if, "UnsignedInteger32"];
(*Import data and partition*)
data = LoadAndPartitionDataV3D[if, zdim, ydim, xdim,bitDepth];
(*Close file and return results*)
Close[if];
metaData = {"Version"-> version, "BitDepth" -> bitDepth, "VoxelSize"-> voxelSize, "Center"-> centerPosition, "IsFiltered"-> isFiltered, "Percentage" -> percentage, "Dimensions" -> {zdim, ydim, xdim}};
{data,metaData}
]
SaveDataV3D::mtd = "Metadata does not contain all required fields or no meta data is given. Default values are chosen for the following fields: `1`";
SaveDataV3D[fn_, data_, metaData_:{}] := Module[{if,isFiltered, dataDimensions, voxelSize, bitDepth,percentage, centerPosition, version, type, allKeys, givenFields, missingFields,defaultValues},
(*Open write file*)
if = OpenWrite[fn, BinaryFormat -> True];
(*Check which keys are present in metadata*)
allKeys = {"Version", "BitDepth","VoxelSize","Center","IsFiltered","Percentage"};
givenFields = Intersection[allKeys,Keys@metaData];
missingFields = Complement[allKeys,Keys@metaData];
defaultValues = {
"Version" -> StringJoin["3D-RA R6.1",StringRepeat[" ", 40 - StringLength["3D-RA R6.1"]]],
"BitDepth" -> 0,
"VoxelSize" -> {1.,1.,1.},
"Center" -> {0,0,0},
"IsFiltered" -> 0,
"Percentage" -> 100
};
If[missingFields =!= {}, Message[SaveDataV3D::mtd,missingFields]];
{version, bitDepth,voxelSize,centerPosition,isFiltered,percentage} = {"Version", "BitDepth","VoxelSize","Center","IsFiltered","Percentage"}/.metaData/.defaultValues;
dataDimensions = Reverse@Dimensions[data];
(*Save version*)
BinaryWrite[if, version, "Character8"];
(*Save data dimension*)
BinaryWrite[if, dataDimensions, "UnsignedInteger32"];
(*Save voxels size*)
BinaryWrite[if, voxelSize, "Real64"];
(*Save data center*)
BinaryWrite[if, centerPosition, "Real64"];
(*Save BitDepth*)
BinaryWrite[if, bitDepth, "UnsignedInteger32"];
(*Save percentage ???? Nobody knows what it is ???? *)
BinaryWrite[if, percentage, "UnsignedInteger32"];
(*Save slope and intercept*)
BinaryWrite[if, isFiltered, "UnsignedInteger32"];
(*Save data*)
type = Switch[bitDepth, 16, "UnsignedInteger16", 32,"UnsignedInteger32",_,"UnsignedInteger16"];
BinaryWrite[if, data, type];
(*Close file and return results*)
Close[if];
]
Enhancing Diffusion on Artificial Data
Example Data
Create example data and add some random noise
CEDOS via Left-Invariant Structure Tensor
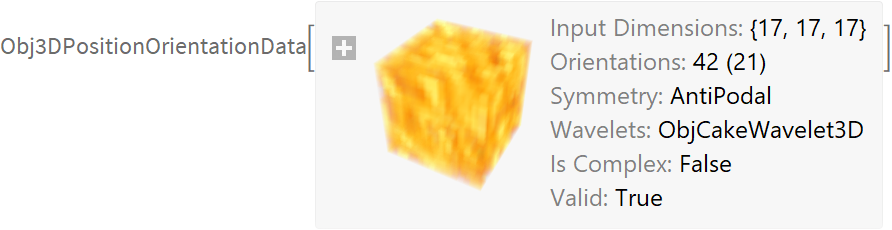
Compute position orientation data
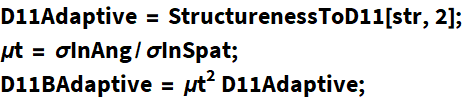
parameters to compute the structureness
Compute the inverse orientation score transform from each time-step
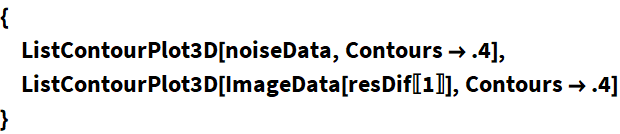
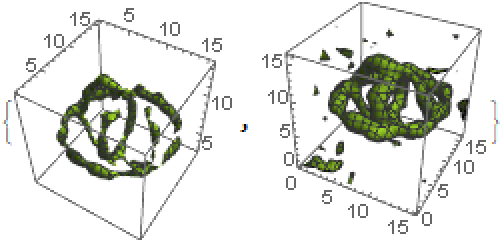
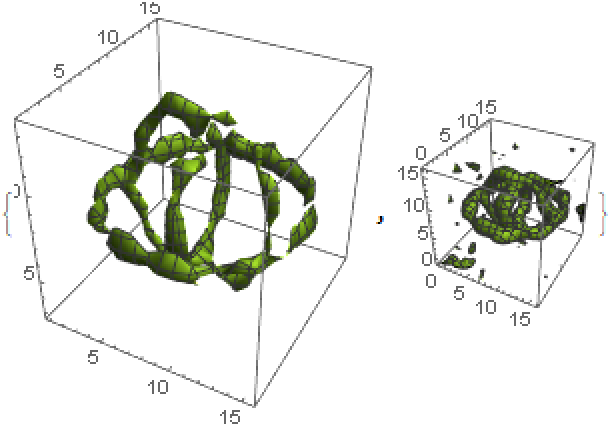
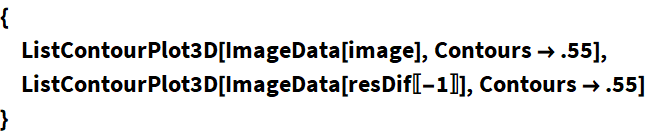
Show the original data versus the enhanced
CEDOS via Left-Invariant Hessian
Compute position orientation data
parameters to compute the structureness
Compute the inverse orientation score transform from each time-step
Show the original data versus the enhanced
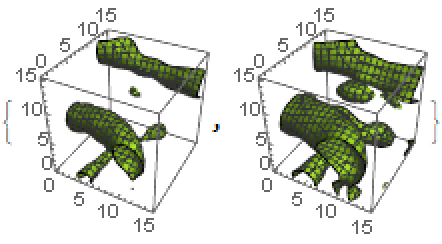
CEDOS on Real Data
Compute position orientation data
parameters to compute the structureness
Compute the inverse orientation score transform from each time-step
Show the original data versus the enhanced
On the complete dataset requires special hardware: