Step By Step Gauge Frames SE(2)
In this tutorial we show how you can compute a data-adaptive (Gauge-)frame. First we show a step by step procedure for two different methods, then we show a short implementation that makes optimal use of the Lie Analysis package.
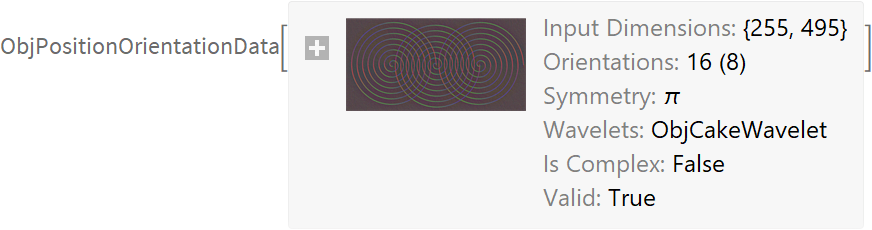
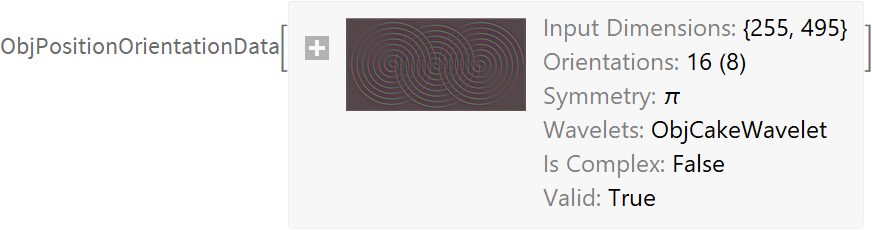
| OrientationScoreGaugeFrames[ObjPositionOrientationData, {σs,σo}, options] | computes the data-adaptive frame from the ObjPositionOrientationData using the Gaussian scales σs and σo |
| OrientationScoreTensor[ObjPositionOrientationData, {σs,σo},derivativeIndex] | computes the Hessian or structure tensor from the ObjPositionOrientationData |
Functions for the data-adaptive frame.
| In[1]:= |

| In[3]:= |

Step by Step Guide
Method 1: Symmetric Product Hessian






Method 2: Structure Tensor





Short Implementation



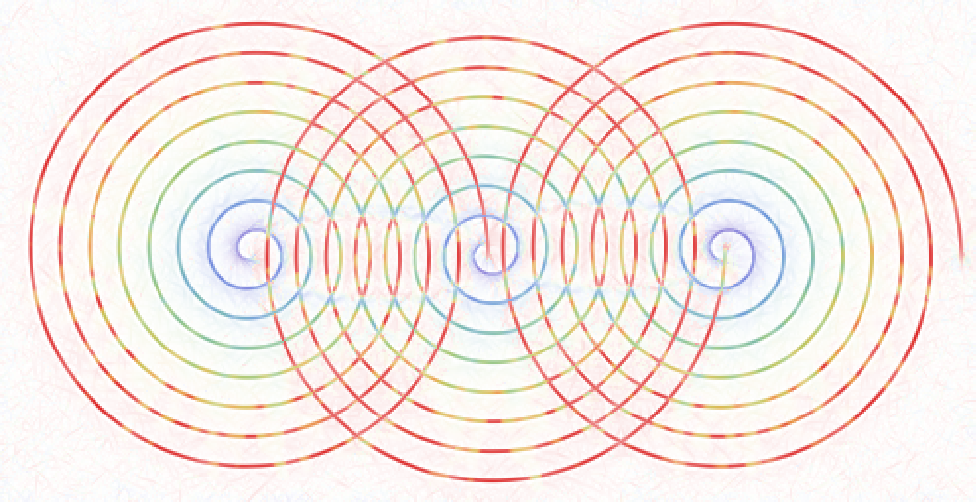
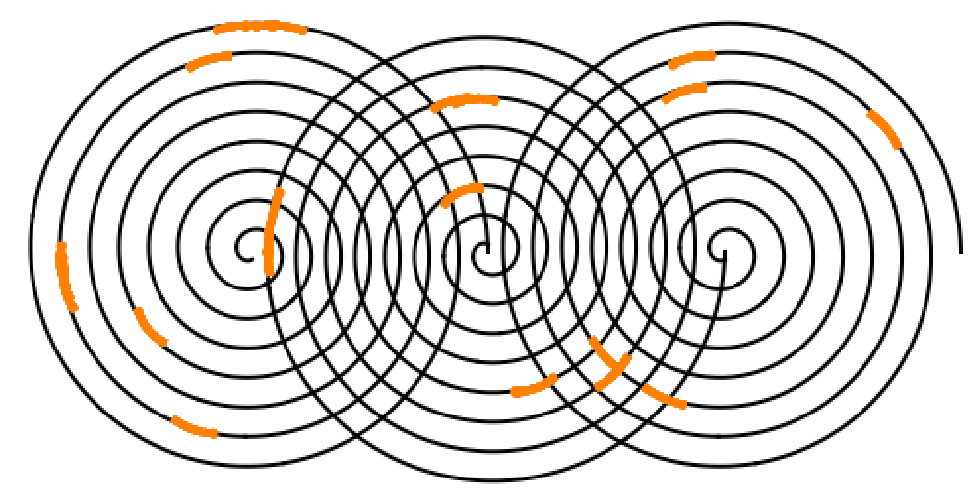
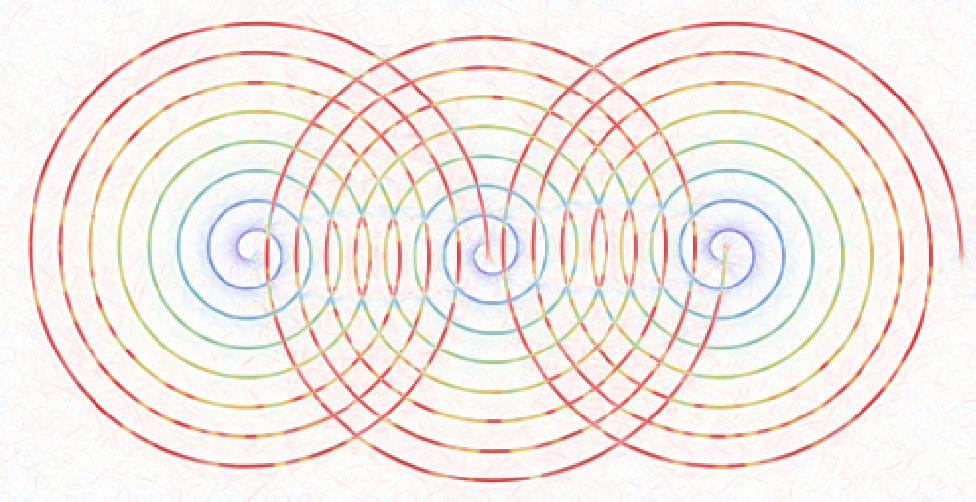
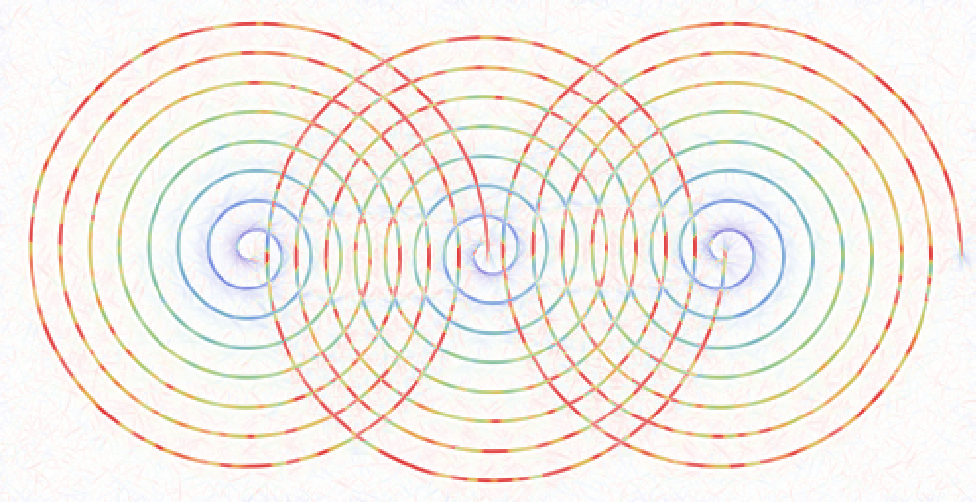
Plotting the Exponential Curves

Function for extracting the group element that maximizes the absolute value of the orientation score (optimal θ for each x,y)